多矢量模型预测下的五相永磁同步电机相间短路容错技术及其控制系统研发
随着现代工业对高可靠性、高性能电机驱动系统的需求日益增长,多相电机(尤其是五相永磁同步电机,PMSM)因其固有的容错能力和高功率密度而备受关注。其中,相间短路故障是最常见的电气故障之一,其引发的转矩脉动、电流冲击和温升等问题严重威胁系统安全。为此,基于多矢量模型预测控制(MPC)的五相PMSM相间短路容错技术应运而生,成为提升系统可靠性的关键研究方向。本文旨在探讨该技术的原理、电机本体设计优化及其控制系统的研发路径。
一、技术背景与挑战
五相PMSM相较于传统三相电机,拥有更多相数自由度,为故障下的重构控制提供了可能。发生相间短路(如两相绕组意外连接)时,故障相会形成短路环流,产生制动力矩和局部过热,破坏磁场的对称性,导致电机性能急剧恶化。传统的容错策略(如硬件冗余、开关重构)往往增加系统复杂性和成本。因此,基于先进控制算法的软件容错方案,尤其是结合模型预测控制,能够在不改变硬件结构的前提下,通过在线优化控制量来抑制故障影响,成为更具前景的解决方案。
二、基于多矢量模型预测的容错控制原理
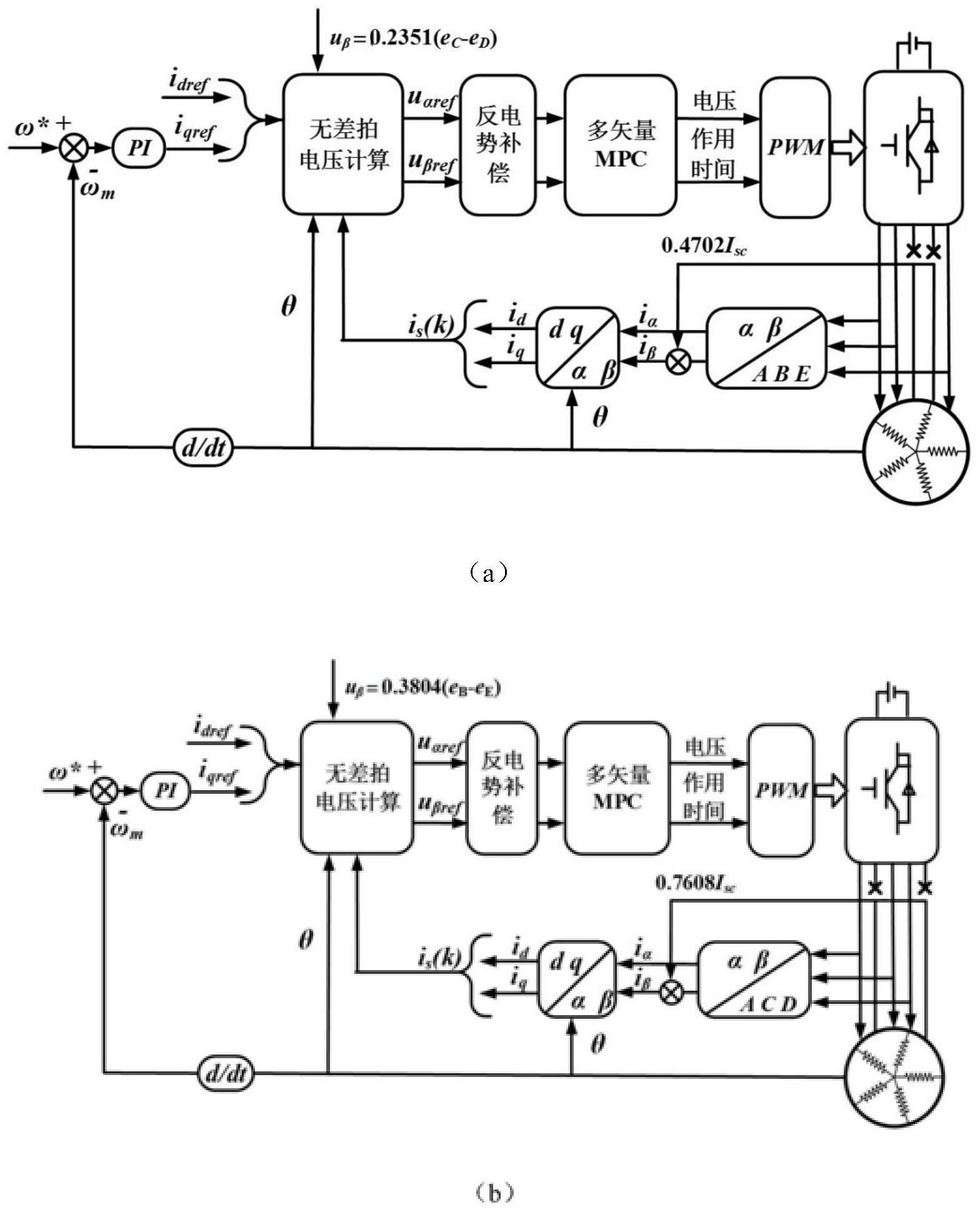
模型预测控制的核心在于利用系统的离散模型,预测未来有限时域内的行为,并通过优化代价函数实时确定最优开关状态。针对五相PMSM相间短路故障,多矢量MPC容错策略主要包括以下步骤:
- 故障检测与定位:通过实时监测相电流、电压或磁链的对称性变化,利用快速诊断算法(如小波分析、状态观测器)准确识别短路相别。这是容错控制的前提。
- 重构数学模型:在检测到特定相间短路后,立即修改电机的数学模型。需考虑短路环流的动态影响,建立包含故障状态的状态空间方程或矢量模型,准确描述故障后系统的电气与机械特性。
- 多矢量优化与预测:在每一个控制周期内,MPC控制器基于重构的模型,评估多个候选电压矢量(或开关状态组合)对未来电流、转矩等状态量的影响。代价函数通常设计为最小化转矩脉动、抑制故障相环流、维持转速稳定等多目标综合优化问题。通过在线求解,选择使代价函数最小的最优电压矢量序列(首矢量执行),实现精准控制。
- 容错运行模式:控制系统平滑切换到容错模式,利用剩余健康相重新分配电流,补偿故障造成的谐波和不平衡,最大程度地维持输出转矩平稳和系统效率。
三、电机本体设计优化
为充分发挥容错控制效能,电机本体需进行针对性设计:
- 绕组结构:采用集中分数槽绕组或特殊设计的分布式绕组,增强相间电磁隔离,降低相间互感,从而限制短路故障时的环流幅值。
- 磁路设计:优化永磁体布局和定子铁芯形状,提高气隙磁场的正弦性,减少谐波含量,有助于降低故障下的转矩脉动和铁损。
- 热管理:考虑短路工况下的局部过热风险,强化冷却系统(如油冷、水冷)设计,并在定子绕组中嵌入温度传感器,为控制策略提供热保护反馈。
- 结构冗余:在物理空间和绝缘等级允许的情况下,可适度增加绕组导体截面积,提升短时过载和抗短路冲击能力。
四、控制系统研发要点
一个完整的容错控制系统研发涉及硬件与软件的协同设计:
- 硬件平台:采用高性能多核数字信号处理器(DSP)或FPGA作为主控芯片,以满足MPC算法复杂、实时性高的计算需求。功率逆变器需具备独立的相桥臂驱动和电流采样能力,并考虑增加快速保护电路以应对极端短路电流。
- 软件算法:研发核心在于高效、鲁棒的MPC算法实现。需解决故障模型准确性、预测时域选择、优化求解速度(如采用查表法、简化算法以降低计算负担)等关键问题。集成故障诊断模块、模式切换逻辑和无缝切换策略。
- 仿真与验证:研发流程应遵循“模型在环(MIL)—软件在环(SIL)—硬件在环(HIL)”的逐级验证方法。首先在MATLAB/Simulink等环境中建立包含故障模型的电机与控制联合仿真平台,验证算法有效性;随后进行代码生成与离线测试;最后搭建HIL实验台,在接近真实的工况下测试控制器的实时响应与可靠性。
- 实验标定:在实际样机平台上,对容错控制器的参数(如权重系数、预测步长)进行精细标定,确保在各种负载和转速下均能实现平稳的容错运行。
五、结论与展望
基于多矢量模型预测控制的五相永磁同步电机相间短路容错技术,代表了高可靠性电机驱动系统的重要发展方向。它通过智能控制算法“软”化解硬件故障冲击,结合优化的电机设计,能够在故障发生后维持系统基本性能,显著提升整体可用性和安全性。该技术的研究将更加深入:一方面,与人工智能(如深度学习)结合,实现更智能的故障预测与自适应容错;另一方面,向更高集成度的多故障容错、以及更广泛的工业应用场景(如航空航天、电动汽车、舰船推进)拓展,推动高性能电机系统向着更智能、更坚韧的方向持续演进。
如若转载,请注明出处:http://www.sfsh-skf.com/product/73.html
更新时间:2026-04-06 23:14:23