基于DSP的永磁同步电机矢量控制伺服系统研发
永磁同步电机(PMSM)以其高效率、高功率密度和优异的动态性能,在现代工业伺服驱动领域得到了广泛应用。矢量控制技术,又称为磁场定向控制,是实现PMSM高性能控制的关键。它通过坐标变换,将定子电流解耦为产生磁场的励磁分量和产生转矩的转矩分量,从而实现类似直流电机的控制特性,极大地提升了系统的动态响应和稳态精度。
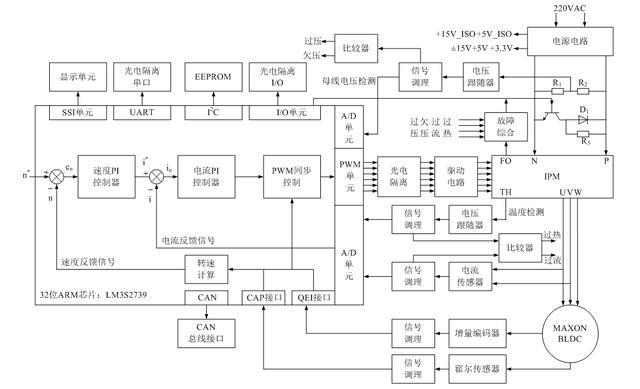
本文聚焦于基于数字信号处理器(DSP)的永磁同步电机矢量控制伺服系统的研究与开发。DSP以其强大的数字运算能力、丰富的外设接口和实时处理特性,成为实现复杂控制算法的理想硬件平台。系统研发的核心在于构建一个完整的硬件与软件协同工作的闭环控制系统。
在硬件层面,研发工作主要包括:
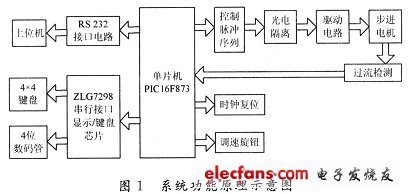
- 主控电路设计:以TI公司的TMS320F28335等高性能DSP为核心,设计最小系统,包括时钟、电源、复位及调试接口。
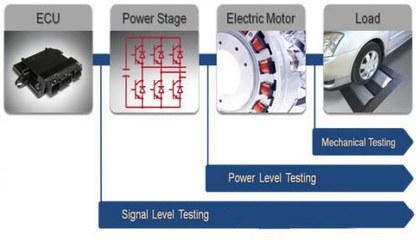
- 功率驱动电路设计:设计基于智能功率模块(IPM)的三相逆变桥电路,包含隔离驱动、过流保护、直流母线电压检测等关键电路,确保功率变换的安全与可靠。
- 信号检测与调理电路设计:高精度检测是闭环控制的基础。系统需要实时获取电机三相电流、直流母线电压以及转子位置信息。其中,转子位置通常通过光电编码器或旋转变压器获取,相应的解码或调理电路需精心设计,以保证角度和速度反馈的准确性与实时性。
- 通讯与接口电路设计:为实现与上位机或其他控制器的信息交互,需设计CAN、SCI或EtherCAT等通讯接口电路。
在软件算法层面,研发的核心是实现矢量控制策略,主要包括:
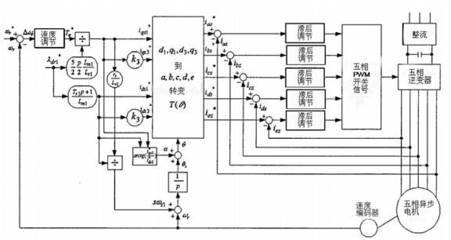
- 坐标变换模块:实现Clark变换(3/2变换)和Park变换及其反变换,这是矢量控制的数学基础。
- 电流环与速度环PI调节器设计:通常采用经典的双闭环结构。内环为电流环,负责快速跟踪转矩与励磁电流指令;外环为速度环,根据给定速度与反馈速度的偏差,输出转矩电流指令。PI参数的整定对系统动态性能至关重要。
- 空间矢量脉宽调制(SVPWM)模块:SVPWM算法能够提高直流母线电压利用率,减小电流谐波和转矩脉动。在DSP中高效实现SVPWM的扇区判断、作用时间计算及比较寄存器赋值是软件实现的重点。
- 转子初始位置检测与启动策略:为确保电机平稳启动,需通过高频注入法或预定位等方法准确辨识转子初始位置,并设计柔和的启动流程。
- 保护与故障处理模块:软件层面需集成过流、过压、过热等故障的实时监测与处理逻辑,增强系统鲁棒性。
系统集成与测试是研发的最后关键环节。在完成硬件制板与软件编程后,需进行联合调试。首先在空载条件下验证基本功能,如SVPWM波形、电流采样、编码器读数等。随后进行带载测试,逐步调整控制参数,优化系统的阶跃响应、抗负载扰动能力以及稳态精度,直至满足伺服系统的性能指标要求。
基于DSP的永磁同步电机矢量控制伺服系统研发是一项集电力电子技术、电机学、控制理论和嵌入式软件技术于一体的综合性工程。通过精心的硬件设计、高效的算法实现以及严格的系统调试,能够开发出响应快速、控制精准、运行可靠的先进伺服驱动系统,为高端装备制造、机器人、数控机床等领域提供核心动力支撑。
如若转载,请注明出处:http://www.sfsh-skf.com/product/47.html
更新时间:2026-04-16 09:51:07