基于DSP的五相异步电机伺服控制系统研发项目立项报告
1. 项目背景与意义
随着现代工业自动化、高端装备制造和精密控制技术的飞速发展,对驱动系统的性能要求日益提高。传统三相电机在某些高可靠性、低转矩脉动、高功率密度及容错运行要求的场合已显不足。五相异步电机因其相数增加,具有转矩脉动小、振动噪声低、功率密度高,尤其是在一相或两相故障时仍能降额继续运行的独特容错能力,在航空航天、电动汽车、精密机床等高精尖领域展现出巨大潜力。
五相电机的控制复杂度远高于三相电机,其多维空间矢量控制、谐波抑制、容错策略等需要强大的实时计算能力。数字信号处理器(DSP)以其出色的数字运算、快速中断响应和丰富的外设接口,成为实现复杂电机控制算法的理想平台。因此,研发一套基于DSP的高性能五相异步电机伺服控制系统,对于打破国外技术垄断、提升我国高端装备核心竞争力具有重要的理论价值与工程意义。
2. 研究目标与内容
核心目标: 设计并实现一套基于DSP芯片(如TI TMS320F28335)为核心的硬件平台,开发相应的控制软件,完成对五相异步电机的高性能伺服控制,实现宽调速范围、高动态响应、低转矩脉动及基本的容错运行功能。
主要研究内容:
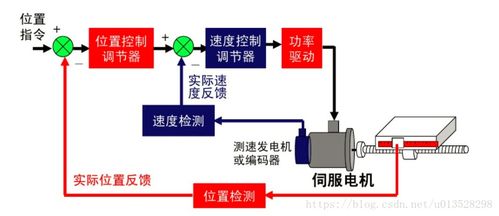
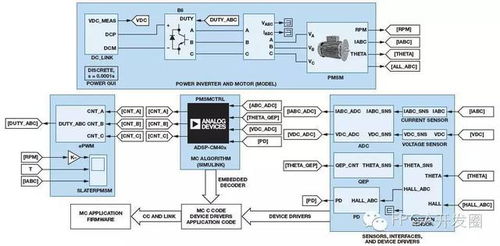
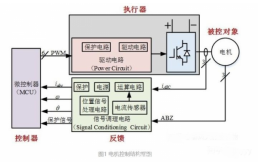
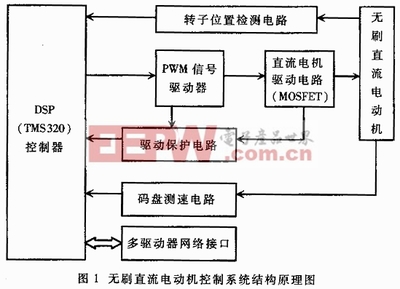
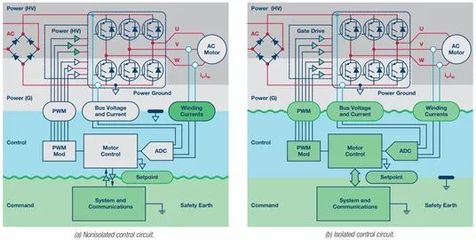
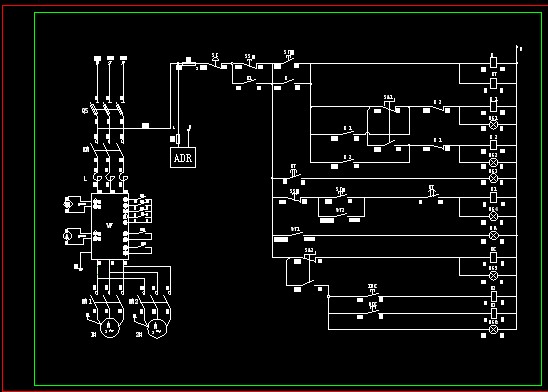
1. 系统总体设计与建模: 分析五相异步电机数学模型及其在静止和旋转坐标系下的解耦控制原理;设计伺服系统整体架构,包括功率驱动、电流采样、位置/速度检测、DSP主控及保护电路。
2. 硬件平台研发:
* 主控电路: 围绕选定的DSP设计最小系统,包括时钟、电源、复位、JTAG调试接口等。
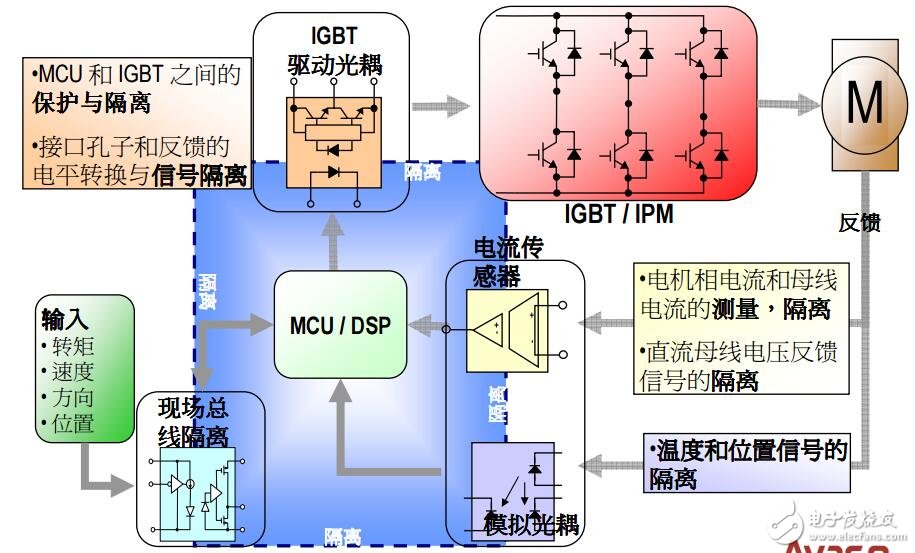
- 功率驱动电路: 设计五相电压型逆变器(由10个IGBT或MOSFET构成)的驱动与保护电路。
- 采样与反馈电路: 设计五相电流采样电路(可采用霍尔传感器或采样电阻+运放方案)、直流母线电压采样以及光电编码器/旋转变压器接口电路。
- 通信与接口电路: 设计CAN、SCI等通信接口,便于上位机监控和指令下发。
- 控制算法与软件研发:
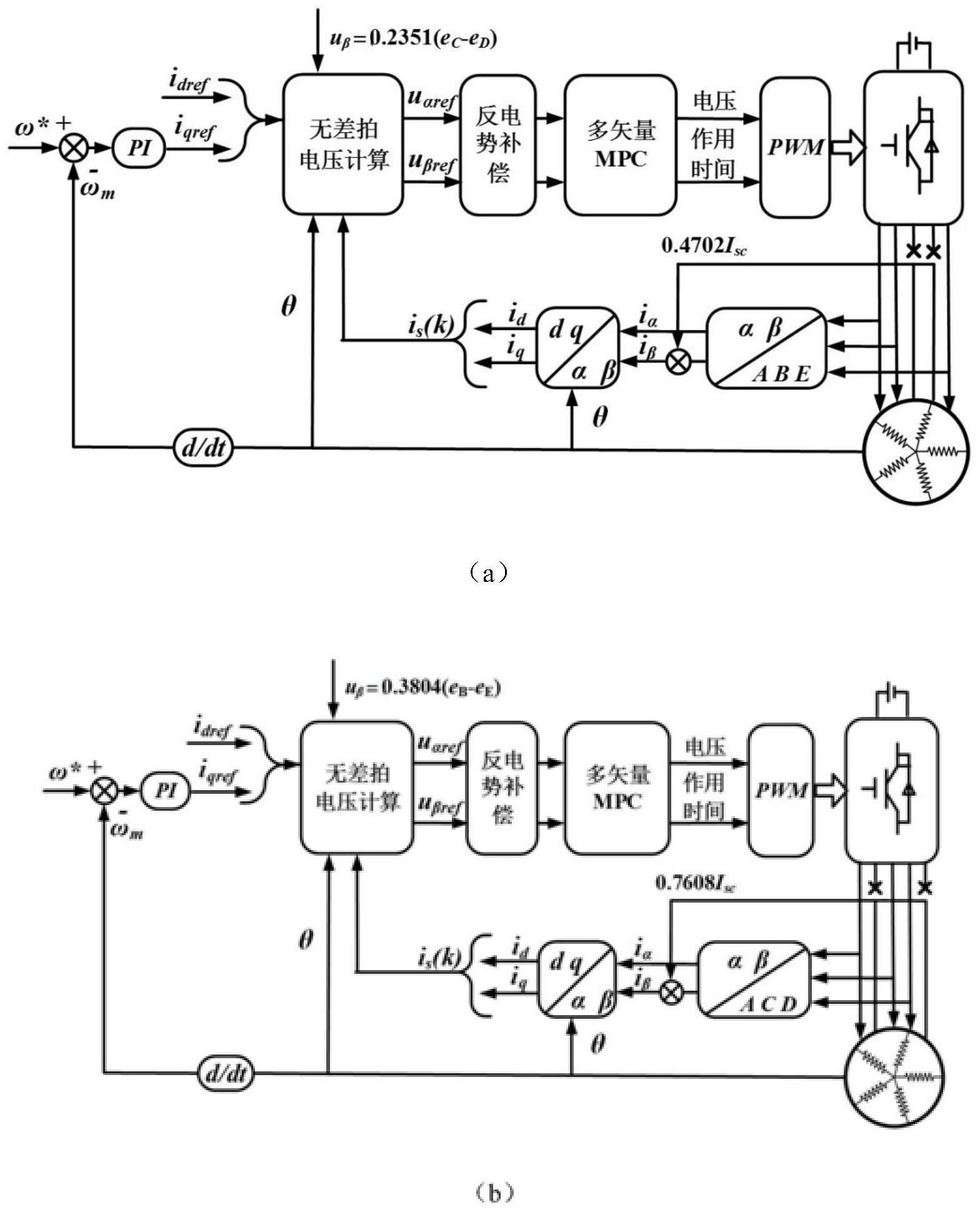
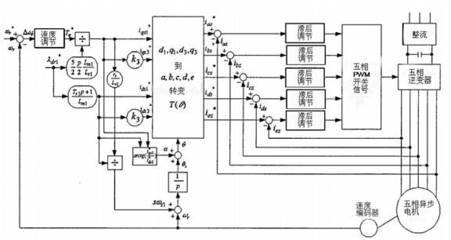
- 基础矢量控制算法: 实现基于转子磁场定向(FOC)的五相异步电机矢量控制,包括坐标变换(Clarke/Park及其反变换)、SVPWM(空间矢量脉宽调制)算法在五相系统的实现。
- 伺服控制环设计: 设计速度环与位置环控制器(通常采用PI或PID,可研究先进控制策略如模糊PID、滑模变结构控制等)。
- 容错控制策略研究: 研究在开路故障情况下,通过调整剩余健康相的电流参考值,实现容错运行的算法。
- 软件系统开发: 采用模块化设计,在Code Composer Studio (CCS) 环境下,用C语言编写系统初始化、中断服务程序(如PWM周期中断、ADC采样中断)、主循环控制程序等。
- 系统集成与实验验证: 搭建实验平台,对硬件各模块进行调试,逐步实现电流环、速度环、位置环的闭环控制。通过实验测试系统的静态特性(稳态精度)、动态特性(阶跃响应、调速范围)以及容错性能。
3. 关键技术难点与创新点
技术难点:
1. 五相SVPWM算法的实时实现: 五相逆变器的空间矢量分布更复杂,扇区判断和矢量作用时间计算比三相系统更繁琐,需在DSP中高效实现。
2. 多变量耦合与解耦控制: 五相电机存在更强的磁场谐波耦合,精确的磁链观测和解耦控制是保证性能的关键。
3. 容错控制策略的平滑切换: 故障检测的快速性与准确性,以及故障后控制策略的无扰切换,是系统高可靠性的保障。
创新点:
1. 基于国产化DSP平台的解决方案: 积极探索采用国产高性能DSP芯片,降低对国外芯片的依赖,提升系统自主可控性。
2. 优化谐波注入策略: 研究在五相SVPWM中注入特定谐波以进一步提升直流母线电压利用率或优化谐波频谱。
3. 智能诊断与容错一体化设计: 将基于模型的故障诊断算法与容错控制策略深度集成,实现从故障感知到重构运行的智能化。
4. 预期成果与应用前景
预期成果:
1. 一套完整的“基于DSP的五相异步电机伺服控制系统”原理样机(含硬件板卡、控制软件、技术文档)。
2. 申请发明专利1-2项,发表高水平学术论文2-3篇。
3. 培养掌握多相电机驱动核心技术的硕士/博士研究生。
应用前景:
本项目的成功实施,可直接或经适应性修改后,应用于以下对驱动系统性能有苛刻要求的领域:
- 航空航天: 电动舵机、飞轮储能系统等。
- 新能源汽车: 高端电动汽车的主驱动或轮毂电机驱动。
- 特种电力推进: 舰船、潜艇的电力推进系统。
- 高端工业装备: 精密数控机床、工业机器人关节驱动、离心机等。
5. 研究计划与团队基础
研究计划(为期24个月):
第1-6个月: 文献调研,理论分析,系统总体方案与硬件详细设计。
第7-12个月: 硬件电路板绘制、加工与单模块调试;基础控制算法仿真研究。
第13-18个月: 硬件系统联调,基础矢量控制软件编写与调试,实现电流环、速度环闭环。
第19-24个月: 位置伺服与容错算法实现,系统整体性能测试与优化,撰写报告与论文专利。
团队基础:
本项目组核心成员长期从事电机控制、电力电子与运动控制领域的教学与科研工作,承担过多项国家级、省部级相关课题,具备丰富的DSP/FPGA嵌入式开发经验,拥有完备的电机测试平台和仪器设备,为项目的顺利实施提供了坚实的人才、理论与实验条件保障。
如若转载,请注明出处:http://www.sfsh-skf.com/product/63.html
更新时间:2026-04-16 16:50:03